|
СХЕМЫ---->
СХЕМЫ АВТОЭЛЕКТРОНИКИ статьи № 1-50---->
СХЕМЫ АВТОЭЛЕКТРОНИКИ статьи № 51-100---->
СХЕМЫ АВТОЭЛЕКТРОНИКИ статьи № 101-150
Введение в автомобильную электронику.
Х. Сига, С. Мидзутани. 1989 г.
Глава 4.2. Управление для движения с постоянной скоростью
Система управления для движения с постоянной скоростью — это система замкнутого регулирования, позволяющая водителю, установив желаемую скорость, двигаться с постоянной скоростью без нажатия на педаль акселератора. Использование этой системы в течение длительного времени при движении по скоростной магистрали снижает утомляемость водителя.
Системы замкнутого управления в автомобильной технике с самого начала создавались на основе электроники. Первые системы были выполнены на аналоговых схемах, однако в настоящее время применяют главным образом цифровые схемы, поэтому ниже мы рассмотрим только цифровую систему управления.
4.2.1. Структура системы
Блок-схема системы показана на рис. 4.20.
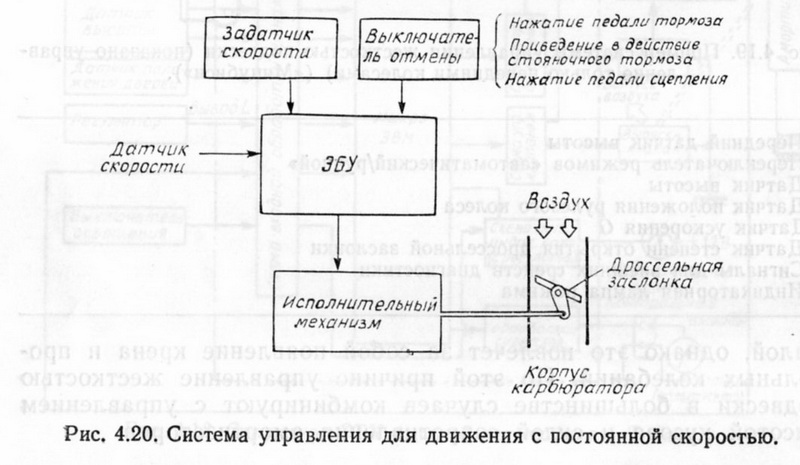
Задатчик скорости предназначен для установки водителем желаемой скорости движения и включения источника питания системы. Если выбран режим управления с постоянной скоростью, то ЭБУ по сигналам датчика скорости вычисляет текущую скорость движения и приводит в действие исполнительный механизм, управляющий положением дроссельной заслонки. Отключение системы движения с постоянной скоростью осуществляется по сигналам отмены (поступающим от выключателей, связанных с педалями тормоза, сцепления и стояночным тормозом).
4.2.2. Исполнительный механизм
Исполнительные механизмы, используемые для замкнутого управления, могут быть двух типов — с электродвигателем и вакуумные. Конструкция вакуумного механизма показана на рис. 4.21.
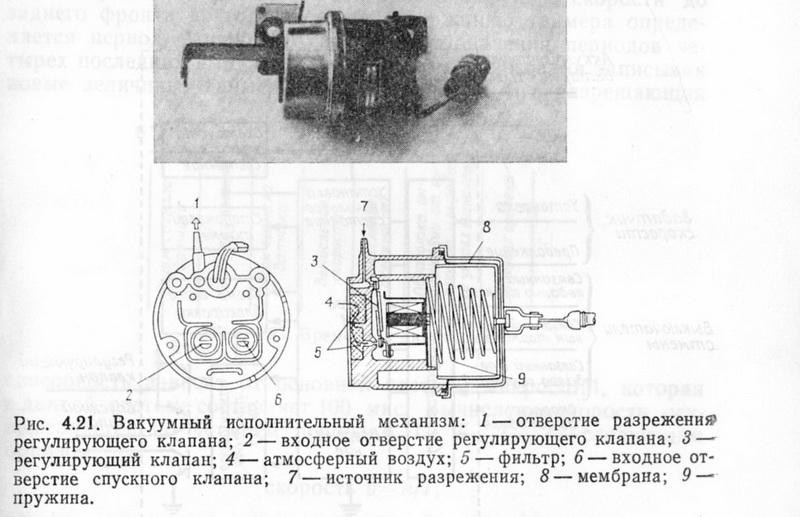
Если через электромагнит пропускается электрический
ток, то отверстие разрежения, связывающее полость механизма с впускным трубопроводом двигателя, открыто, а выходное отверстие закрыто. В результате в полости исполнительного механизма создается разрежение и мембрана втягивается. При отсутствии тока через электромагнит отверстие разрежения регулирующего клапана закрыто, а выходное отверстие открыто. Поэтому в полости механизма устанавливается атмосферное давление и мембрана под действием пружины возвращается.
Изменяя соотношение времени пропускания и времени отсутствия тока через электромагнит (скважность сигнала), можно изменять давление воздуха в полости исполнительного механизма
и управлять положением мембраны, что в конечном счете обеспечивает управление степенью открытия дроссельной заслонки.
В описываемом механизме имеется спускной клапан, через который вводится атмосферный воздух при отмене режима движения с постоянной скоростью. Это обеспечивает безопасность даже в том случае, если входное отверстие регулирующего клапана оказывается по каким-либо причинам в закрытом состоянии.
Таким образом, в режиме движения с постоянной скоростью через электромагнит пропускается электрический ток и входное отверстие закрыто. При отмене режима — ток отсутствует и в механизм поступает атмосферный воздух.
4.2.3. Электронный блок управления
Структурная схема ЭБУ показана на рис. 4.22.

Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
Используется 4-разрядная однокристальная микроЭВМ, которая выполняет обработку в соответствии с временной диаграммой, изображенной на рис. 4.23.

Период временной диаграммы составляет примерно 50 мс, что соответствует частоте приведения в действие исполнительного механизма.
(1) Вычисление скорости
Датчик скорости устанавливается в спидометре и приводится в действие тросиком спидометра, который при движении со скоростью 60 км/ч совершает 637 оборотов в минуту. Магнитный поток 4-полюсного постоянного магнита, приводимого в движение этим тросиком, преобразуется чувствительным элементом в сигналы скорости (одному обороту соответствуют 4 импульса). Сигнал скорости через схему входной обработки поступает на вывод прерывания микроЭВМ. Прерывание возникает по заднему фронту импульса скорости. В этот момент происходит запуск внутреннего таймера микроЭВМ. Таким образом измеряется время от заднего фронта одного импульса скорости до заднего фронта другого, т. е. по содержанию таймера определяется период. МикроЭВМ запоминает значения периодов четырех последних импульсов, при каждом прерывании записывая новые величины. Таймер имеет 8 разрядов. Его разрешающая способность зависит от основной частоты микроЭВМ, которая в данной системе составляет 100 мкс. Вычисление скорости осуществляется по четырем периодам Т1 Т2, Тз, Т4 следующим образом:
скорость v = k/Tt
где k — постоянная величина; Т = Т1+Т2+Т3+Т4.
В связи с тем что датчик за один оборот вырабатывает четыре импульса, такой подсчет скорости позволяет компенсировать смещение импульсов, вызванное неравномерностью вращения. Более того, даже если в сигнале датчика присутствует составляющая помехи, ее влияние будет незначительно — скорость, вычисленная за один оборот, осредняется.
(2) Вычисление скважности
После вычисления текущей скорости происходит ее сравнение со скоростью, хранящейся в памяти. Управление исполнительным механизмом (и дроссельной заслонкой) осуществляется таким образом, чтобы устранить полученную разность. На дороге с уклоном невозможно добиться постоянства скорости при такой же степени открытия дроссельной заслонки, как при движении по ровной дороге. Поэтому в данной системе управление степенью открытия дроссельной заслонки осуществляется изменением скважности сигналов, приводящих в действие исполнительный механизм.
Принцип выбора скважности показан на рис. 4.24.

Сервис онлайн-записи на собственном Telegram-боте
Попробуйте сервис онлайн-записи VisitTime на основе вашего собственного Telegram-бота:
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно.
Зарегистрироваться в сервисе
Если при установке скорости на значении V0 скважность составляет D0, то на идеально ровной дороге сохранение Do обеспечивает движение с постоянной скоростью. Однако на подъеме при той же скважности скорость падает до значения V1. Дл я того чтобы увеличить скорость до V0, нужно изменить скважность. В соответствии с законом управления скважность становится равной Da, а значение скорости — Va. Применение такого закона управления связано с необходимостью обеспечения устойчивости движения (исключения колебаний скорости и т. п.). Это вызывает небольшое отклонение скорости от заданной, т. е. появляется ошибка управления. Закон управления описывается линейным уравнением и представляет собой зависимость скважности D от скорости S.
D = D0+k(S0-S),
где k — постоянная, D0 — скважность при движении с заданной скоростью, S0 — заданная скорость движения.
Вычисления, связанные с этим выражением, выполняются в ЭБУ. Следует отметить, однако, что определенное влияние на качество регулирования оказывает время запаздывания срабатывания исполнительного механизма, так как для установления требуемой скорости на подъемах и спусках необходимо затратить какое-то время. Поэтому часто вводят поправку, используя до достижения требуемой скорости некоторую скорость, отличающуюся от заданной. В частности, управление осуществляют таким образом, чтобы при движении дроссельной заслонки в направлении открытия скважность была больше вычисленной для заданной скорости, а при движении заслонки в направлении закрытия — меньше вычисленной (рис. 4.25).

|